HOME >





H-IIA26号機『はやぶさ2』打ち上げまであとわずか☆
2014.11.28|shiozawa
小惑星探査機“はやぶさ”が地球に帰還してから早やくも4年。
そんなはやぶさの後継機の“はやぶさ2”が今月の11日に長い旅へと飛び立ちます。
■H-IIA26号機『はやぶさ2』打ち上げ日時決定
2014年9月30日、JAXA宇宙航空研究開発機構は、小惑星探査機『はやぶさ2』および相乗り小型副ペイロード3機を搭載したH-IIAロケット26号機の打ち上げを2014年11月30日午後1時24分48秒と発表した。
「はやぶさ2」および3機の相乗り小型ペイロードはH-IIAロケット26号機(202型)は、2014年11月30日午後1時24分48秒に種子島宇宙センターから打ち上げられる予定。
小惑星「1999 JU3」を目指し、往復6年間の探査を行う。
引用:Response

帰還は約6年後ということで東京オリンピックの年の2020年あたりでしょうか。
ところでは前機のはやぶさと今回のはやぶさ2ではスペックがどう異なるのでしょうか。
◆技術を洗練
はやぶさ2はH2Aロケットで種子島宇宙センター(鹿児島県)を出発。
約1年後、地球の引力を利用して加速する「スイングバイ」と呼ばれる軌道変更を行い、目的地の小惑星「1999JU3」を目指す。
小惑星には2018年夏に到着。
約1年半をかけて内部の物質採取や地表の観測などを行う。
物質を収めたカプセルは20年末の帰還時に本体から切り離され、オーストラリア南部のウーメラ砂漠に落下する。
往復で6年間、約52億キロの長旅だ。宇宙航空研究開発機構(JAXA)の国中均(ひとし)プロジェクトマネージャは「初代は挑戦的な計画をこなした一方、多くの故障や失敗も経験した。それを踏まえ、はやぶさ2は技術の洗練に注力し、大変優れたものが出来上がった」と強調する。
新旧はやぶさの装備の目玉は、主に往復の航路で使う「イオンエンジン」。
燃料のキセノンガスをイオン化して電圧をかけ、加速して噴射する。
燃費に優れる半面、従来の方式は耐久性が低いのが難点だった。このため初代はやぶさは、ガスをイオン化する際にマイクロ波を使うことで耐久性を高める新手法を採用。
それでも故障が相次ぎ、残った機能をやりくりして何とかしのいだ。
今回はイオン化する際の高温に耐えるようエンジンの構造を工夫して長寿命化を図ったほか、推力を2割向上させている。小惑星での離着陸などに使うのは「化学エンジン」。
初代は着陸後に異常が起きて燃料が噴出し、さらに配管内が凍結して使えなくなった。
この影響で機体は制御不能に陥り、太陽電池パネルを太陽の方角に向けられず電源を喪失。
回復までの約7週間にわたり通信が途絶した。◆制御装置を温存
今回は配管が破損、凍結しないよう溶接箇所を減らしたり、2系統ある配管を別々に温めたりする対策を取った。
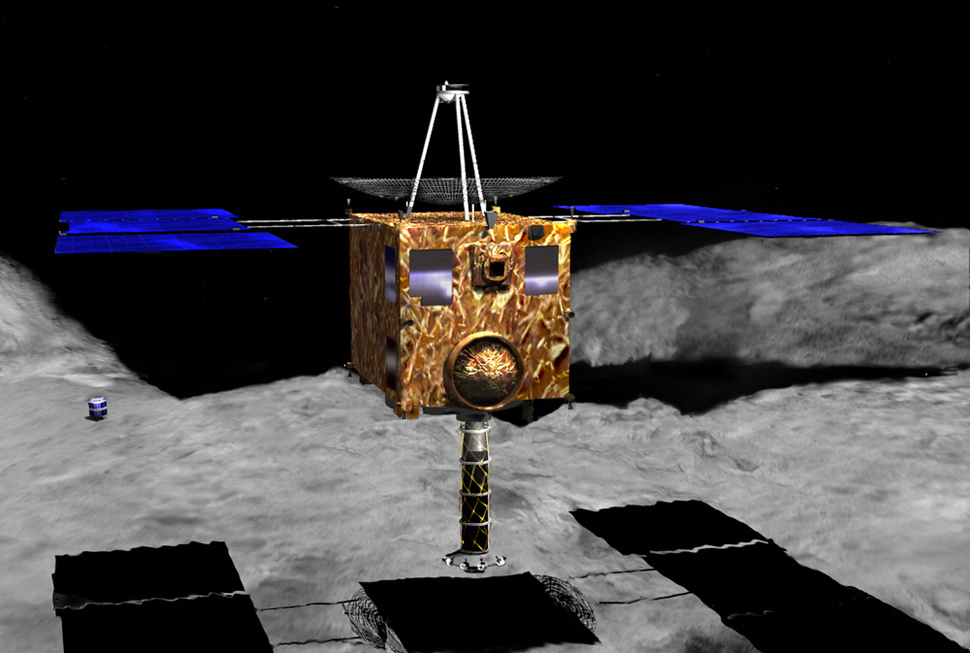
はやぶさ2の外観で、初代とはっきり異なるのは機体上部のアンテナだ。
おわん形のパラボラアンテナを平面タイプに変更することで軽量化した。
使用する周波数帯も追加し、初代の4倍の高速通信が可能に。通常は初代と同じ周波数帯で地球と交信するが、小惑星から大量の観測データを送る際に高速通信が威力を発揮する。
引用:産経ニュース

今回の旅も50億キロ越えの長旅の計画☆
はやぶさでトラブル続きだったイオンエンジンもしっかり進化し、アンテナや通信技術などあらゆるものがしっかり対策されているようです。
それもそうですね。
初代はやぶさが飛び立った2003年からすでに11年。
この11年間の技術的進歩はとても大きなものでした。
また、今回のはやぶさ2には小型の表面探査ロボを搭載しているようです。
■30日打上げの「はやぶさ2」、国内5大学共同開発の小型表面探査ロボットを搭載
東北大学は、国内の5大学による大学コンソーシアムが共同開発した小型表面探査ロボット『MINERVA-II-2』が「はやぶさ2」に搭載され、11月30日に小惑星に向けて打上げられると発表した。
はやぶさ2は、有機物や水が含まれた物質があると考えられる小惑星「1999JU3」から試料を持ち帰るサンプルリターンを主たる目的としている。
同探査機には、小惑星の表面に降り立って科学観測、移動探査するための小型ロボットが計4機搭載される。
MINERVA-II-2は、2011年春に国内の大学研究者からなるコンソーシアムが共同で開発した。
はやぶさ2が小惑星に到着した後表面に投下され、重力が小さい環境での移動機構を検証するための工学実験を中心に、カメラ画像撮影などのミッションを行う。
開発では、東北大学が全体の取りまとめと、微小振動によるマイクロホップ型移動機構の開発を担当した。
また、山形大学がバイメタルを使った環境駆動型移動機構、東京電機大学が永久磁石を使った内部撃力型移動機構、大阪大学が板バネを使った弾性エネルギー開放型移動機構、東京理科大学が搭載カメラ系をそれぞれ開発した。
2003年に打上げられた初代「はやぶさ」にも、小型探査ロボット『MINERVA』が搭載されたものの、小惑星表面に着陸できなかった。
今回は計3機のMINERVA-IIローバーが搭載され、表面探査を実施する。特に大学コンソーシアムが担当した『ROVER 2』では、微小重力表面移動に関する新規技術に挑戦する。
引用:Response

合計で4台も地上探査機を搭載してるようです。
また、1kmも満たない小惑星ながらも微量ながら重力があるということで、特殊な技術で地上を移動できるようです。
それにしても前回のはやぶさにも地上探査機を搭載していたということは知りませんでした。
今回は最低でも1台はうまく上陸し、調査できるといいですね。
それよりなにより、まずは小惑星探査機「はやぶさ2」を載せたH-IIAロケット26号機が無事打ちあがり、計画通りの軌道にのれますように。
ありがとうございます。